Lego #103: CoreXY plotter
Een “H bot” stond ook al lang op mijn ideeen lijstje. Toen ik daarmee begon liep ik vrij snel aan tegen een nadeel wat genoemd wordt in https://the3dprinterbee.com/corexy-vs-hbot/ : de wagen gaat snel scheef lopen wat (teveel) extra wrijving veroorzaakt.
Dus ben ik overgestapt op een “CoreXY” versie. Op voorhand zag ik het somber in om een (uiteraard Lego) touwtje te gebruiken, maar het werkt uitstekend.
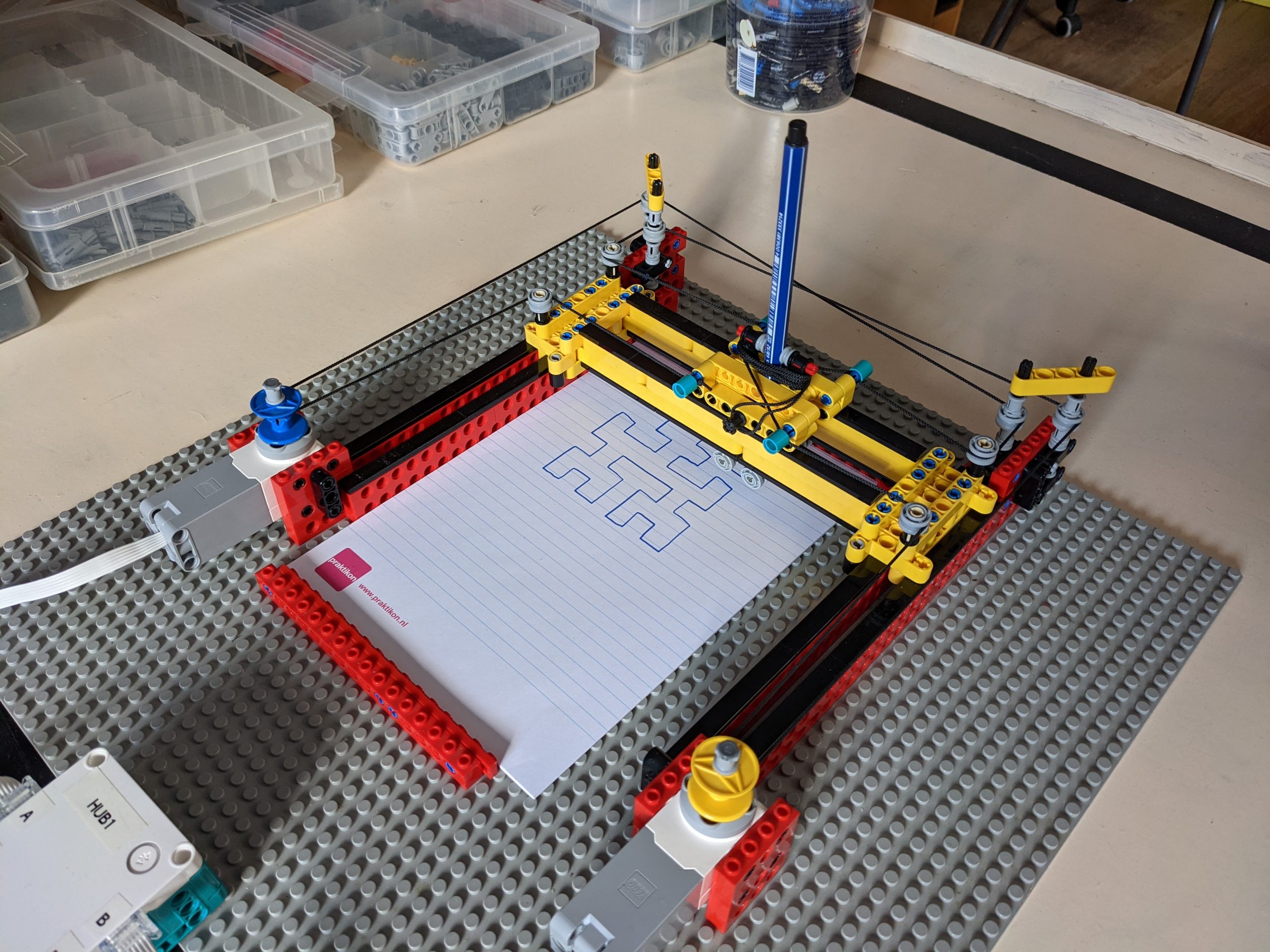
Op de foto is de plotter klaar met een “Hilbert Curve level 3”. Het algorithme van https://www.compuphase.com/hilbert.htm heb ik daartoe omgezet naar Python.

